当前位置:网站首页>STM32 基于固件库的工程模板的建立
STM32 基于固件库的工程模板的建立
2022-08-11 05:25:00 【LIGAZN菜鸟】
STM32不同于C51,在新建工程时要麻烦很多,其中大概有十一个步骤。
1. 新建一个TEMPLATE文件夹,在这个文件夹中新建四个文件夹CORE、USER、FWLIP、OBJ

2.打开MDK,新建一个TEMPLATE项目,保存在USER文件夹中,芯片包选择STM32F103ZET6
![]()
3. 把固件stm32\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\STM32F10x_StdPeriph_Driver路径下大的inc和src复制到工程文件夹的FWLIP文件夹中
固件包中的文件
复制好的工程模板中的文件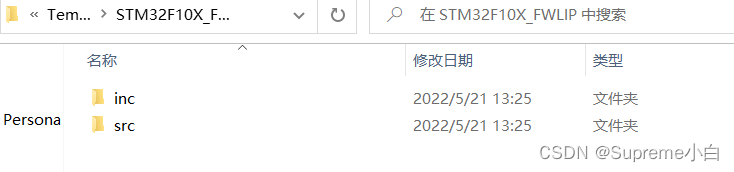
4. 把固件包stm32\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\CoreSupport两个文件复制到工程模板中的CORE路径中
固件包中的文件

复制好的工程模板中的文件

5. 复制启动文件。把固件包中的stm32\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x\startup\arm一个启动文件(大于128k为大容量用hd,大于64k小于128k为中等容量用md,小于64k的为小容量用ld)复制到CORE目录中
固件包中的文件

复制好的工程模板中的文件
![]()
6.复制stm32\STM32F10x_StdPeriph_Lib_V3.5.0\Libraries\CMSIS\CM3\DeviceSupport\ST\STM32F10x中的三个文件到USER目录
固件包中的文件

复制好的工程模板中的文件

7. 复制stm32\STM32F10x_StdPeriph_Lib_V3.5.0\Project\STM32F10x_StdPeriph_Template路径中的四个文件到USER目录
固件包中的文件

复制好的工程模板中的文件

USER目录下共有七个.c和.h文件
8. 文件复制已经完成,打开MDK在新建的项目中添加FWLIP、CORE、USER文件夹,并添加对应的文件。其中FWLIP中添加src中的所有文件,USER添加三个C文件,CORE目录添加.C和.S文件

9. MDK中魔术棒中output勾选create hex

10. 设置头文件路径
在下图设置中include path中添加所有头文件的子目录(一定要是最后一级目录)

10. 在魔术棒中Define添加宏定义STM32F10X_HD,USE_STDPERIPH_DRIVER,这个宏定义一定不能错,否则会出问题
11. 主函数清空,写入要写的主函数内容,若编译报错,尝试删除OBJ文件夹中的所有文件。
这样,基于固件库的工程模板建好了
总结:在添加c文件后,要注意在魔术棒中添加头文件的路径,因为C文件和H文件不一定在同一个文件夹中,如果不设置头文件路径,则找不到头文件
边栏推荐
猜你喜欢



随机推荐
CVPR2022——Not All Points Are Equal : IA-SSD
OpenPCDet安装最新版:spconv一步到位
Maykle Studio - HarmonyOS Application Development First Training
梅科尔工作室-深度学习第二讲 BP神经网络
The selection points you need to know about the helmet identification system
Maykel Studio - Django Web Application Framework + MySQL Database Second Training
梅科尔工作室-DjangoWeb 应用框架+MySQL数据库第六次培训
AI智能图像识别的工作原理及行业应用
梅科尔工作室-Pr第二次培训笔记(基本剪辑操作和导出)
C语言字节对齐,看这篇就够了
Diagnostic Log and Trace——DLT 离线日志存储
推出 Space Marketplace 测试版 | 新发布
Wisdom construction site safety helmet identification system
Pay “Attention” to Adverse Weather
The selection points you need to know about the helmet identification system
Maykel Studio - Django Web Application Framework + MySQL Database Fourth Training
Safety helmet recognition - construction safety "regulator"
产品经理与演员有着天然的相似
物联网基础知识学习
Joint 3D Instance Segmentation and Object Detection for Autonomous Driving